控制循环
控制型模式最核心的就是控制循环的概念。
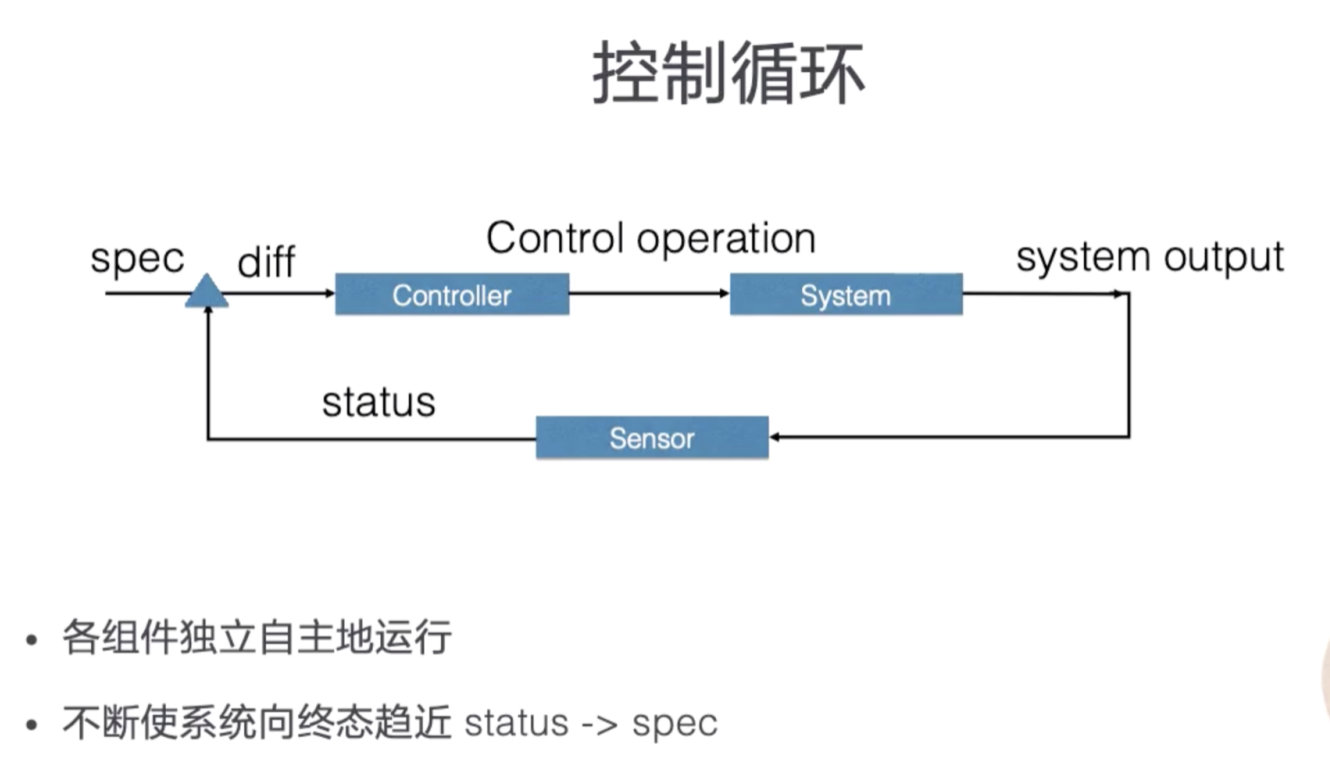
在控制循环中包括了三个逻辑组件
- 控制器,
- 被控制的系统
- 能够观测系统的传感器 sensor
当然这些组件都是逻辑的,外界通过修改资源 spec 来控制资源,控制器比较资源 spec 和 status,从而计算一个 diff,diff 最后会用来决定执行对系统进行什么样的控制操作,控制操作会使得系统产生新的输出,并被传感器以资源 status 形式上报,控制器的各个组件将都会是独立自主地运行,不断使系统向 spec 表示终态趋近。
sensor
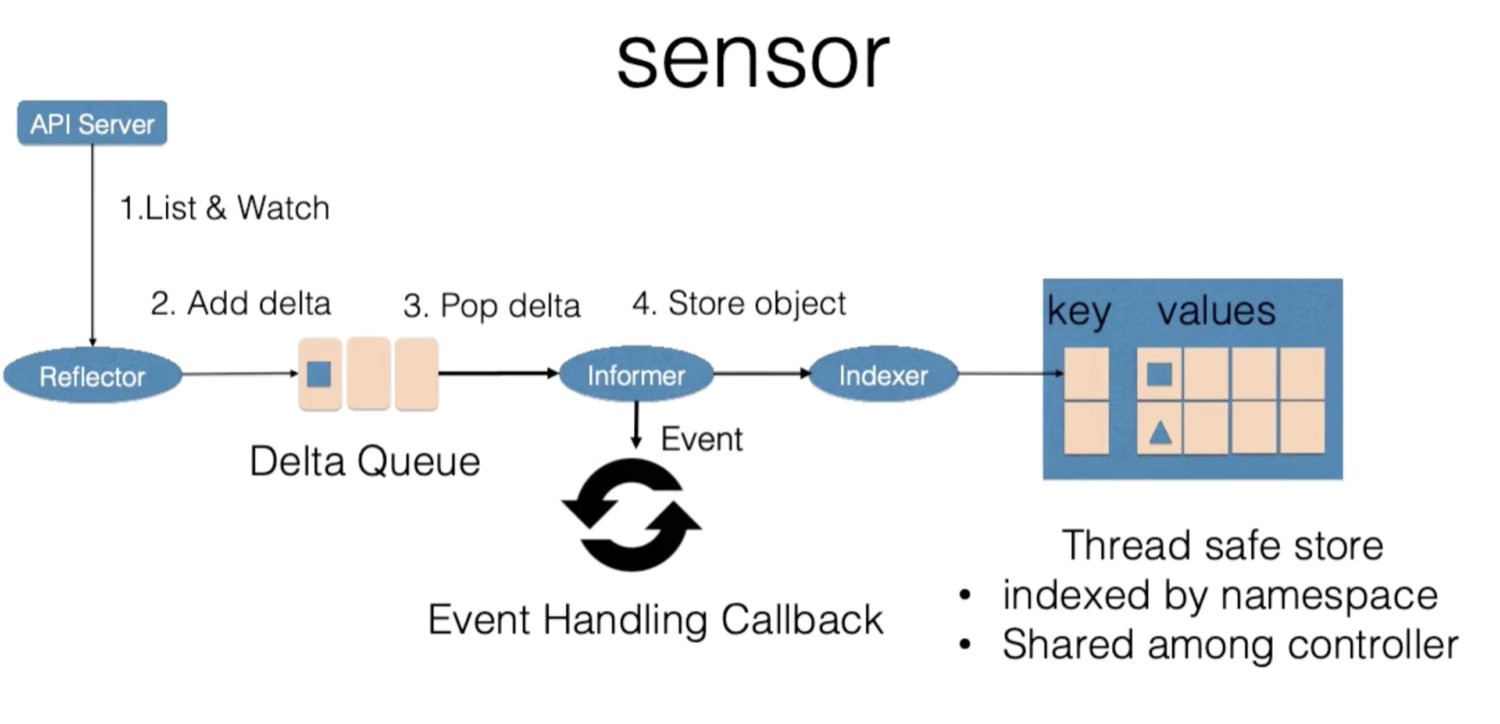
控制循环中逻辑的传感器主要由 Reflector、Informer、Indexer 三个组件构成。
Reflector 通过 List 和 Watch K8s server 来获取资源的数据。
- List 用来在 Controller 重启以及 Watch 中断的情况下,进行系统资源的全量更新;
- Watch 则在多次 List 之间进行增量的资源更新;
- Reflector 在获取新的资源数据后,会在 Delta 队列中塞入一个包括资源对象信息本身以及资源对象事件类型的 Delta 记录,Delta 队列中可以保证同一个对象在队列中仅有一条记录,从而避免 Reflector 重新 List 和 Watch 的时候产生重复的记录。
Informer 组件不断地从 Delta 队列中弹出 delta 记录,然后把资源对象交给 indexer,之后,再把这个事件交给事件的回调函数。
indexer 把资源记录在一个缓存中,缓存在默认设置下是用资源的命名空间来做索引的,并且可以被 Controller Manager 或多个 Controller 所共享。
控制器
资源名=namespace 名/pod名,对资源名标识
控制循环中的控制器组件主要由事件处理函数以及 worker 组成,事件处理函数之间会相互关注资源的新增、更新、删除的事件,并根据控制器的逻辑去决定是否需要处理。对需要处理的事件,会把事件关联资源的命名空间以及名字塞入一个工作队列中,并且由后续的 worker 池中的一个 Worker 来处理,工作队列会对存储的对象进行去重,从而避免多个 Woker 处理同一个资源的情况。
Worker 在处理资源对象时,一般需要用资源的名字来重新获得最新的资源数据,用来创建或者更新资源对象,或者调用其他的外部服务,Worker 如果处理失败的时候,一般情况下会把资源的名字重新加入到工作队列中,从而方便之后进行重试。
例子
ReplicaSet name:rSA namespace:nSA,replicas 从 2 被改到 3
replicas 检测到变化并完成更改
发现 ReplicaSet 发生变化后,在 delta 队列中塞入了对象是 rsA,而且类型是更新的记录。
Informer
- 一方面把新的 ReplicaSet 更新到缓存中,并与 Namespace nsA 作为索引。
- 另外一方面,调用 Update 的回调函数,ReplicaSet 控制器发现 ReplicaSet 发生变化后会把字符串的 nsA/rsA 字符串塞入到工作队列中,工作队列后的一个 Worker 从工作队列中取到了 nsA/rsA 这个字符串的 key,并且从缓存中取到了最新的 ReplicaSet 数据。

Worker 通过比较 ReplicaSet 中 spec 和 status 里的数值,发现需要对这个 ReplicaSet 进行扩容,因此 ReplicaSet 的 Worker 创建了一个 Pod,这个 pod 中的 Ownereference 取向了 ReplicaSet rsA。
完成状态的保存
然后 Reflector Watch 到的 Pod 新增事件,在 delta 队列中额外加入了 Add 类型的 deta 记录,一方面把新的 Pod 记录通过 Indexer 存储到了缓存中,另一方面调用了 ReplicaSet 控制器的 Add 回调函数,Add 回调函数通过检查 pod ownerReferences 找到了对应的 ReplicaSet,并把包括 ReplicaSet 命名空间和字符串塞入到了工作队列中。
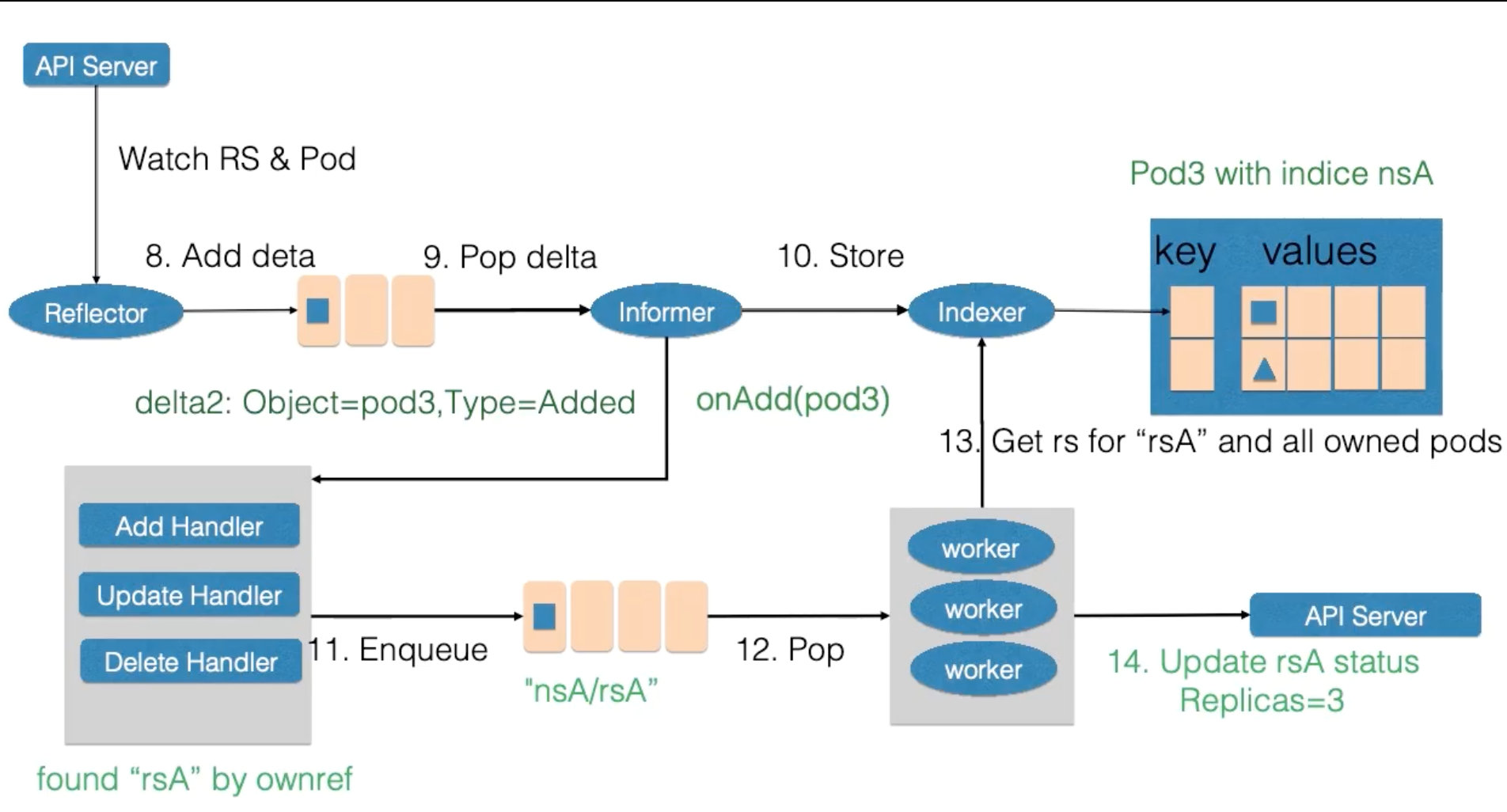
ReplicaSet 的 Woker 在得到新的工作项之后,从缓存中取到了新的 ReplicaSet 记录,并得到了其所有创建的 Pod,因为 ReplicaSet 的状态不是最新的,也就是所有创建 Pod 的数量不是最新的。因此在此时 ReplicaSet 更新 status 使得 spec 和 status 达成一致。
why使用声明式api
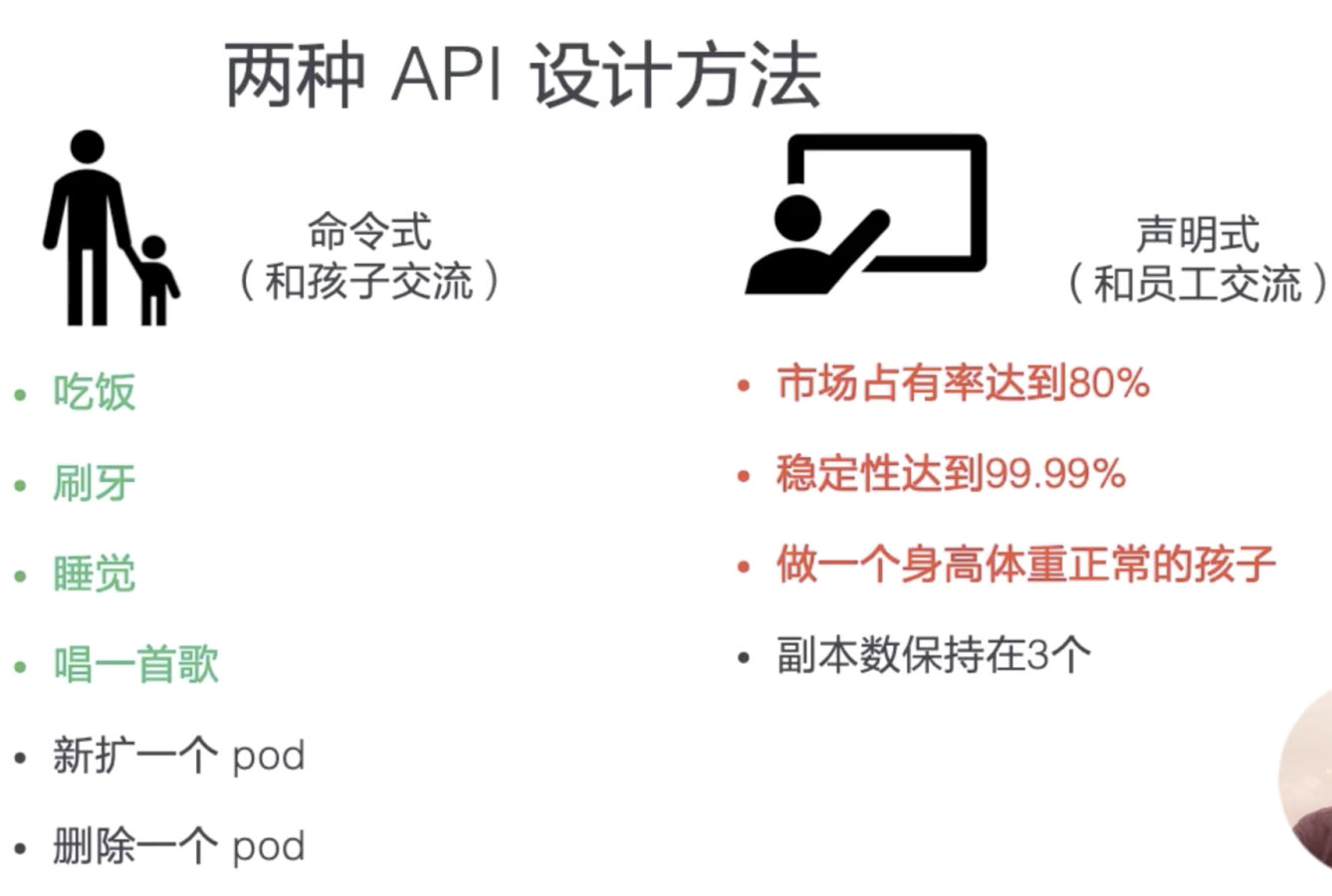
Kubernetes 控制器模式依赖声明式的 API。另外一种常见的 API 类型是命令式 API。为什么 Kubernetes 采用声明式 API,而不是命令式 API 来设计整个控制器呢?
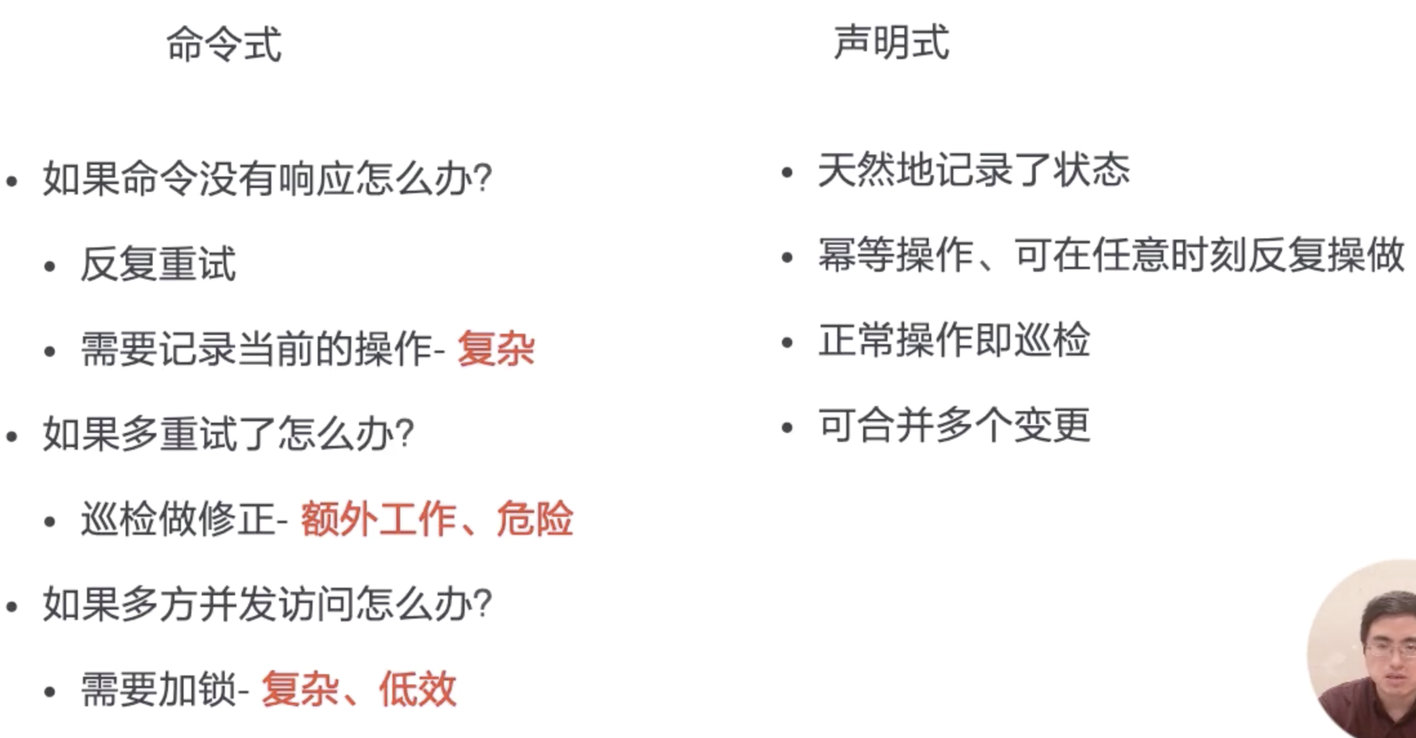
命令式的问题
命令 API 最大的一个问题在于错误处理
-
在大规模的分布式系统中,错误是无处不在的。一旦发出的命令没有响应,调用方只能通过反复重试的方式来试图恢复错误,然而盲目的重试可能会带来更大的问题。
假设原来的命令,后台实际上已经执行完成了,重试后又多执行了一个重试的命令操作。为了避免重试的问题,系统往往还需要在执行命令前,先记录一下需要执行的命令,并且在重启等场景下,重做待执行的命令,而且在执行的过程中,还需要考虑多个命令的先后顺序、覆盖关系等等一些复杂的逻辑情况。
-
实际上许多命令式的交互系统后台往往还会做一个巡检的系统,用来修正命令处理超时、重试等一些场景造成数据不一致的问题
因为巡检逻辑和日常操作逻辑是不一样的,往往在测试上覆盖不够,在错误处理上不够严谨,具有很大的操作风险,因此往往很多巡检系统都是人工来触发的。
-
命令式 API 在处理多并发访问时,也很容易出现问题
有多方并发的对一个资源请求进行操作,并且一旦其中有操作出现了错误,就需要重试。那么最后哪一个操作生效了,就很难确认,也无法保证。很多命令式系统往往在操作前会对系统进行加锁,从而保证整个系统最后生效行为的可预见性,但是加锁行为会降低整个系统的操作执行效率。
声明式优点:
天然地记录了系统现在和最终的状态
不需要额外的操作数据。另外因为状态的幂等性,可以在任意时刻反复操作。在声明式系统运行的方式里,正常的操作实际上就是对资源状态的巡检,不需要额外开发巡检系统,系统的运行逻辑也能够在日常的运行中得到测试和锤炼,因此整个操作的稳定性能够得到保证。
最后,因为资源的最终状态是明确的,我们可以合并多次对状态的修改。可以不需要加锁,就支持多方的并发访问。
控制器模式总结
- Kubernetes 所采用的控制器模式,是由声明式 API 驱动的。确切来说,是基于对 Kubernetes 资源对象的修改来驱动的;
- Kubernetes 资源之后,是关注该资源的控制器。这些控制器将异步的控制系统向设置的终态驱近;
- 这些控制器是自主运行的,使得系统的自动化和无人值守成为可能;
- 因为 Kubernetes 的控制器和资源都是可以自定义的,因此可以方便的扩展控制器模式。特别是对于有状态应用,我们往往通过自定义资源和控制器的方式,来自动化运维操作。这个也就是后续会介绍的 operator 的场景。