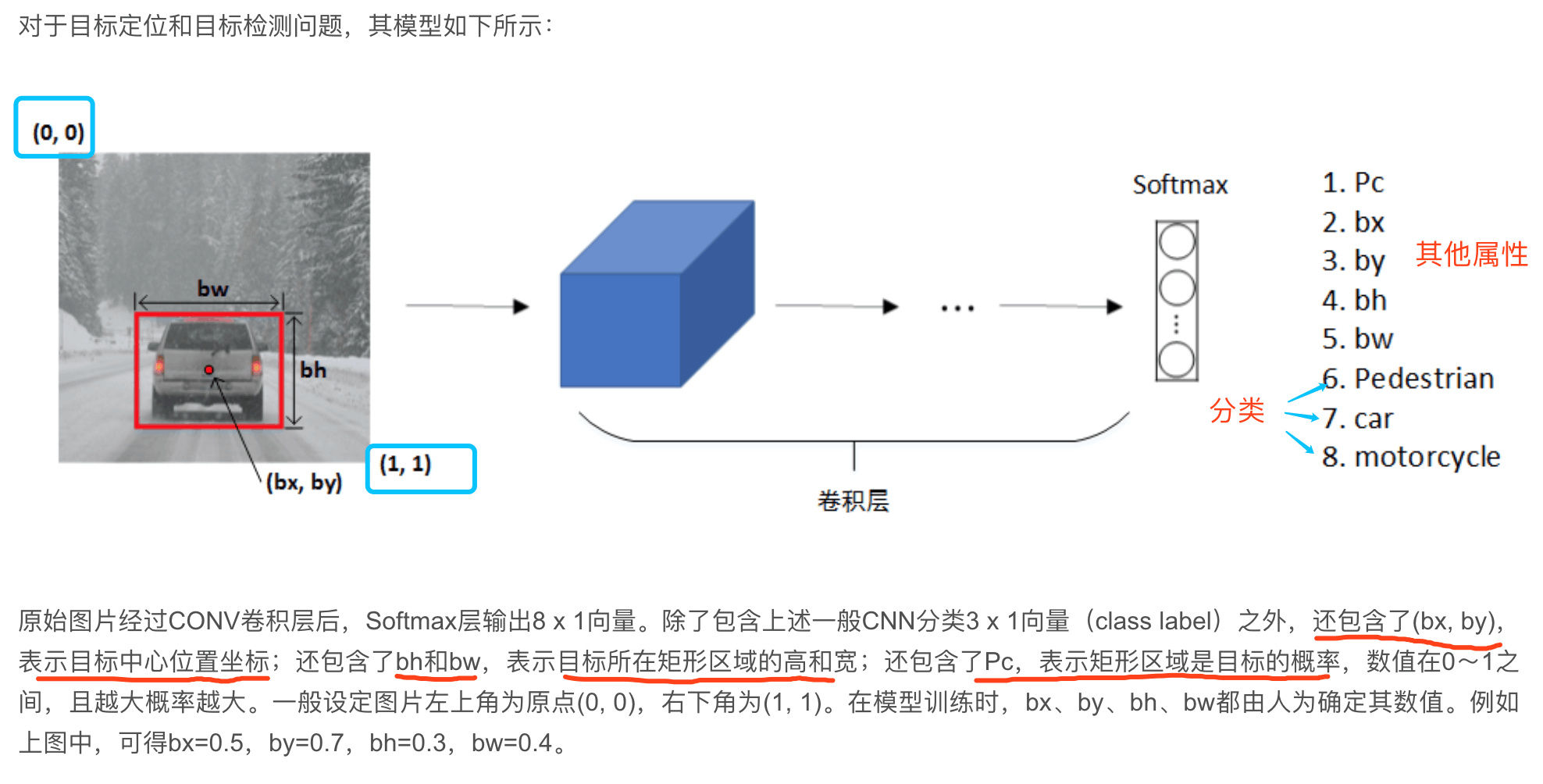
Object Localization
目标定位和目标检测(包含多目标检测)
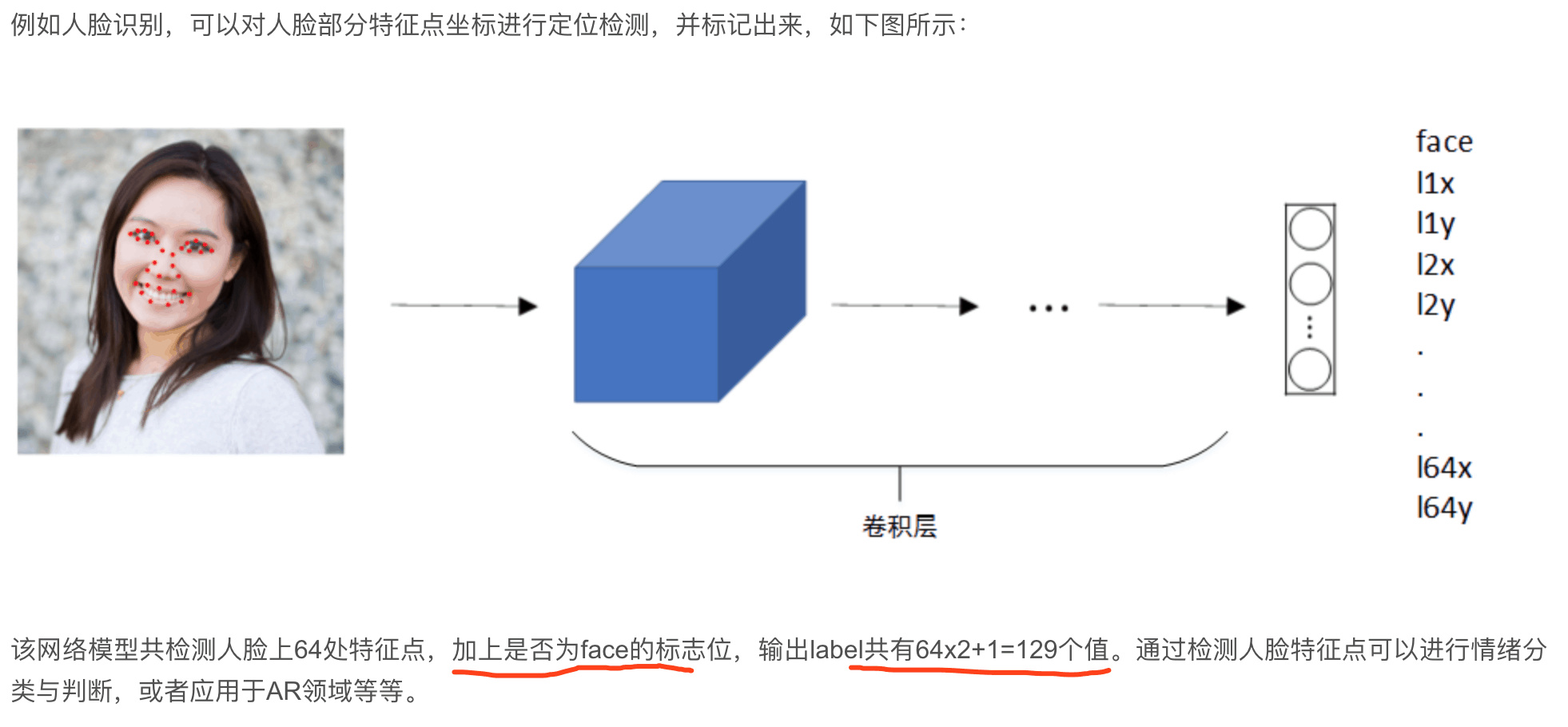
Landmark Detection
除了矩形区域检测目标类别和位置外,我们还可以仅对目标的关键特征点坐标进行定位,这些关键点被称为landmarks。
Object Detection
目标检测的一种简单方法是滑动窗算法。这种算法首先在训练样本集上搜集相应的各种目标图片和非目标图片。 注意训练集图片尺寸较小,尽量仅包含相应目标。然后,使用这些训练集构建CNN模型,使得模型有较高的识别率。
最后,在测试图片上,选择大小适宜的窗口、合适的步进长度,进行从左到右、从上倒下的滑动。每个窗口区域都送入之前构建好的CNN模型进行识别判断。 若判断有目标,则此窗口即为目标区域;若判断没有目标,则此窗口为非目标区域。
- 滑动窗算法的优点是原理简单,且不需要人为选定目标区域(检测出目标的滑动窗即为目标区域)。
- 缺点:滑动窗的大小和步进长度都需要人为直观设定。滑动窗过小或过大,步进长度过大均会降低目标检测正确率。 如果滑动窗和步进长度较小,整个目标检测的算法运行时间会很长。所以,滑动窗算法虽然简单,但是性能不佳,不够快,不够灵活。
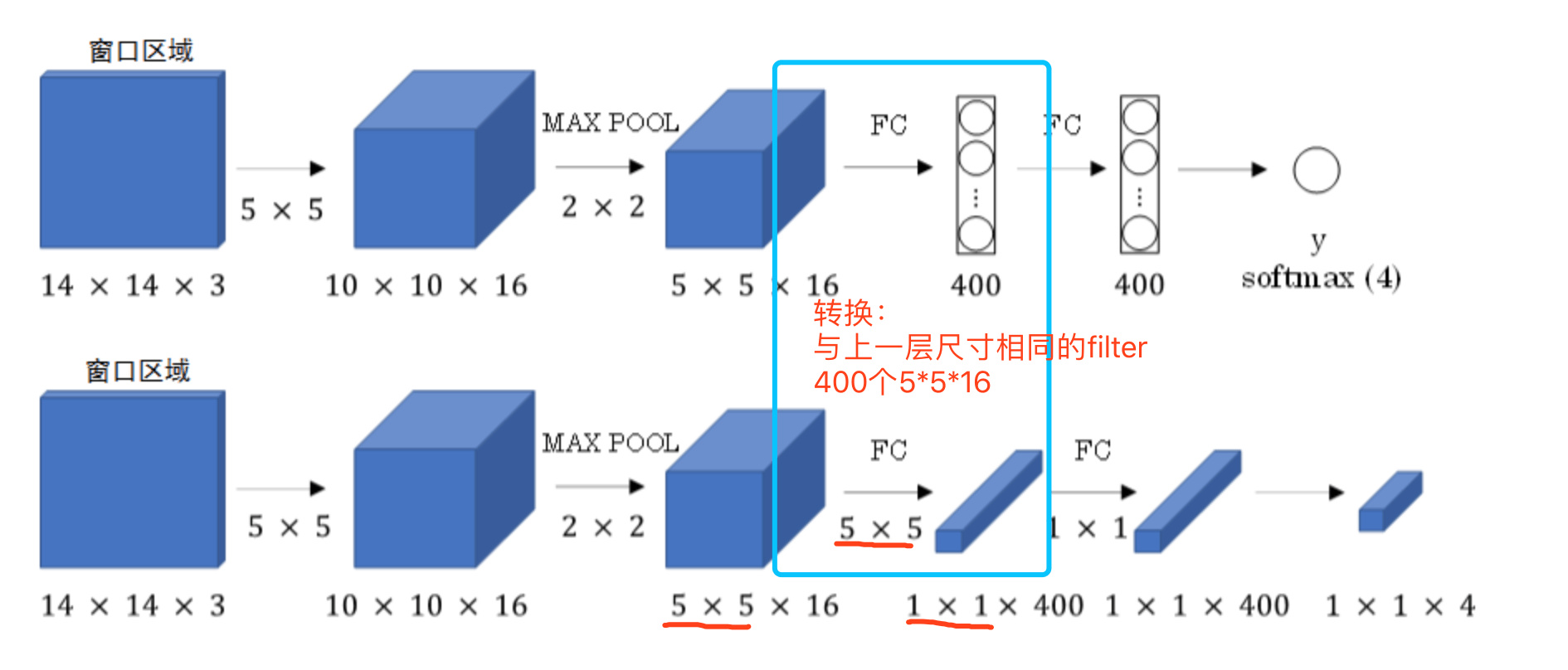
Turn Fc layer into conv layer
全连接层转变成为卷积层,只需要使用与上层尺寸一致的滤波算子进行卷积运算即可。窗口步进长度与选择的MAX POOL大小有关。如果需要步进长度为4,只需设置MAX POOL为4 x 4即可
 利用卷积操作代替滑动窗算法,则不管原始图片有多大,只需要进行一次CNN正向计算,因为其中共享了很多重复计算部分,这大大节约了运算成本。之前的滑动窗算法需要反复进行CNN正向计算。
利用卷积操作代替滑动窗算法,则不管原始图片有多大,只需要进行一次CNN正向计算,因为其中共享了很多重复计算部分,这大大节约了运算成本。之前的滑动窗算法需要反复进行CNN正向计算。
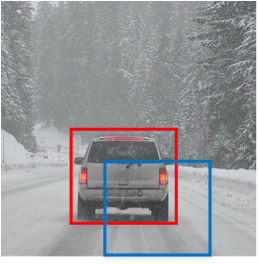
Bounding Box Predictions
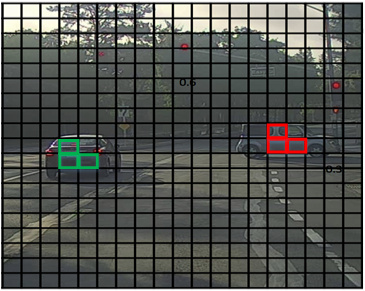
滑动窗口算法有时会出现滑动窗不能完全涵盖目标的问题,YOLO(You Only Look Once)算法将原始图片分割成n x n网格,每个网格代表一块区域

然后,利用上一节卷积形式实现滑动窗口算法的思想,对该原始图片构建CNN网络,得到的的输出层维度为3 x 3 x 8。其中,3 x 3对应9个网格,每个网格的输出包含8个元素:
\[y=\left [ \begin{matrix} Pc \\ bx \\ by \\ bh \\ bw \\ c1 \\ c2 \\ c3 \end{matrix} \right ]\]如果目标中心坐标$(b_x,b_y)$不在当前网格内,则当前网格Pc=0;相反,则当前网格Pc=1(即只看中心坐标是否在当前网格内)。 判断有目标的网格中,$b_x,b_y,b_h,b_w$限定了目标区域。值得注意的是,当前网格左上角坐标设定为(0, 0),右下角坐标设定为(1, 1), $(b_x,b_y)$范围限定在[0,1]之间,但是$b_h,b_w$可以大于1。因为目标可能超出该网格,横跨多个区域,如上图所示。目标占几个网格没有关系,目标中心坐标必然在一个网格之内。 划分的网格可以更密一些。网格越小,则多个目标的中心坐标被划分到一个网格内的概率就越小,这恰恰是我们希望看到的。
Intersection Over Union
交集与并集之比,可以用来评价目标检测区域的准确性。 真实目标区域,检测目标区域 之间的交集I, 并集U :
\[IoU=\frac IU\]IoU可以表示任意两块区域的接近程度。IoU值介于0~1之间,且越接近1表示两块区域越接近。
Non-max Suppression
YOLO算法中,可能几个相邻网格都判断出同一目标的中心坐标在其内。使用非最大值抑制(Non-max Suppression)算法。
- 图示每个网格的Pc值可以求出,Pc值反映了该网格包含目标中心坐标的可信度。
- 首先选取Pc最大值对应的网格和区域,
- 然后计算该区域与所有其它区域的IoU,剔除掉IoU大于阈值(例如0.5)的网格(剔除与该网格交叠较大的网格)。这样就能保证同一目标只有一个网格与之对应,且该网格Pc最大,最可信。
- 接着,再从剩下的网格中选取Pc最大的网格,重复上一步的操作。最后,就能使得每个目标都仅由一个网格和区域对应。
Anchor Boxes
之前都是一个网格至多只能检测一个目标。那对于多个目标重叠的情况,使用不同形状的Anchor Boxes
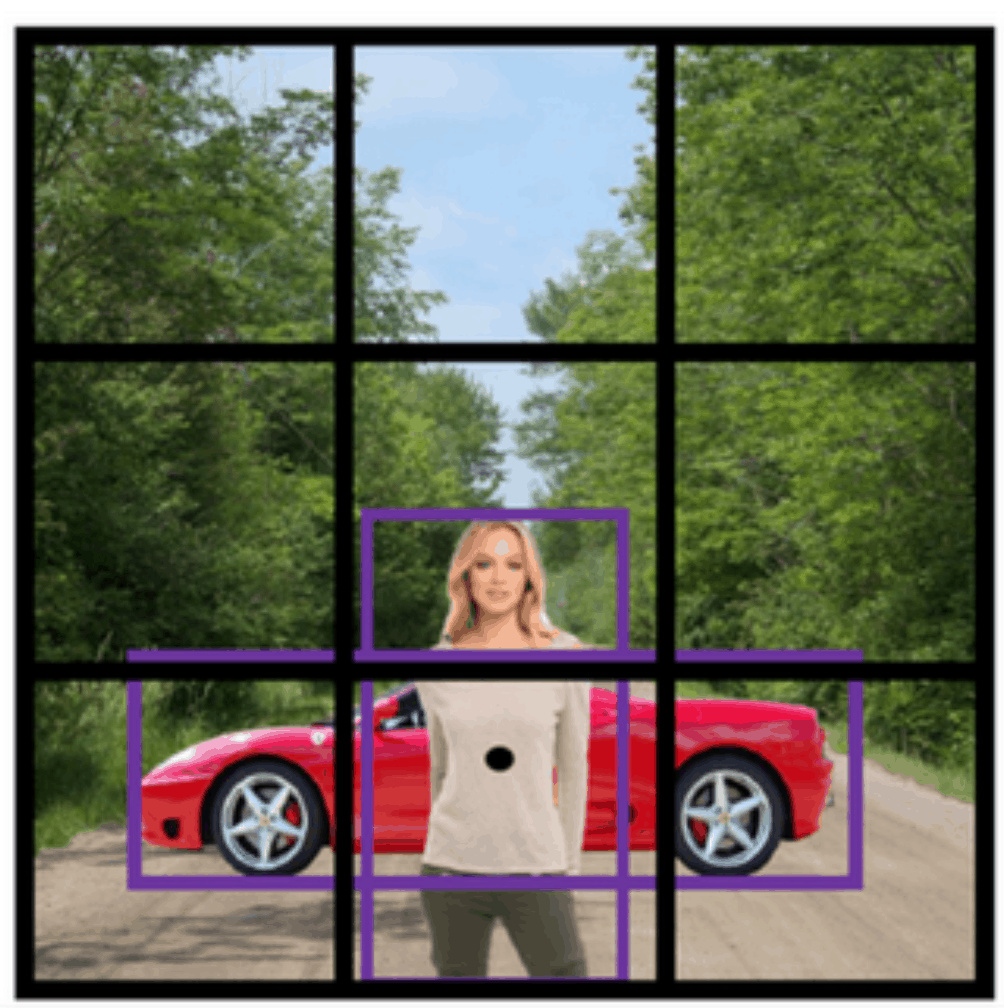
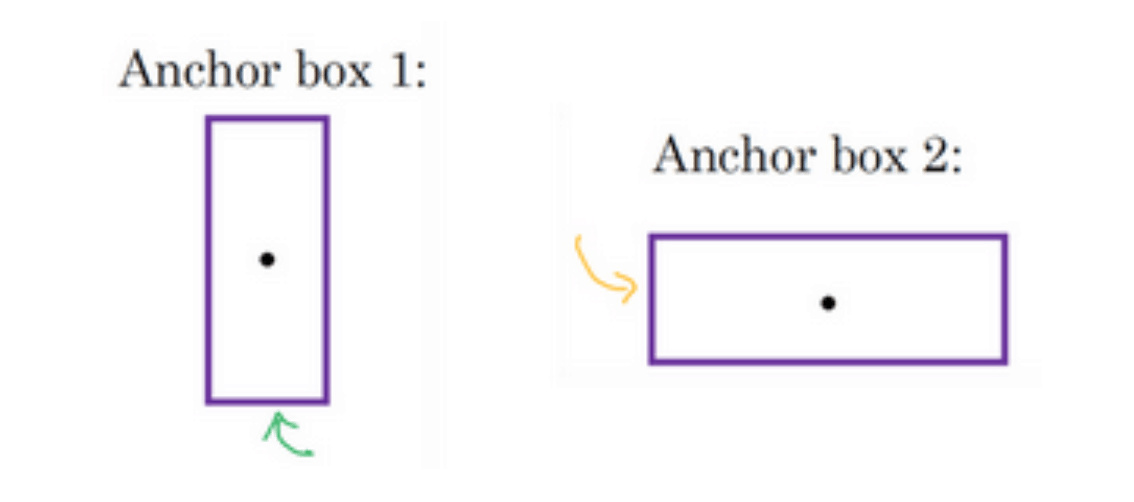
 同一网格出现了两个目标:人和车。为了同时检测两个目标,我们可以设置两个Anchor Boxes,Anchor box 1检测人,Anchor box 2检测车。
每个Anchor box都有一个Pc值,若两个Pc值均大于某阈值,则检测到了两个目标。
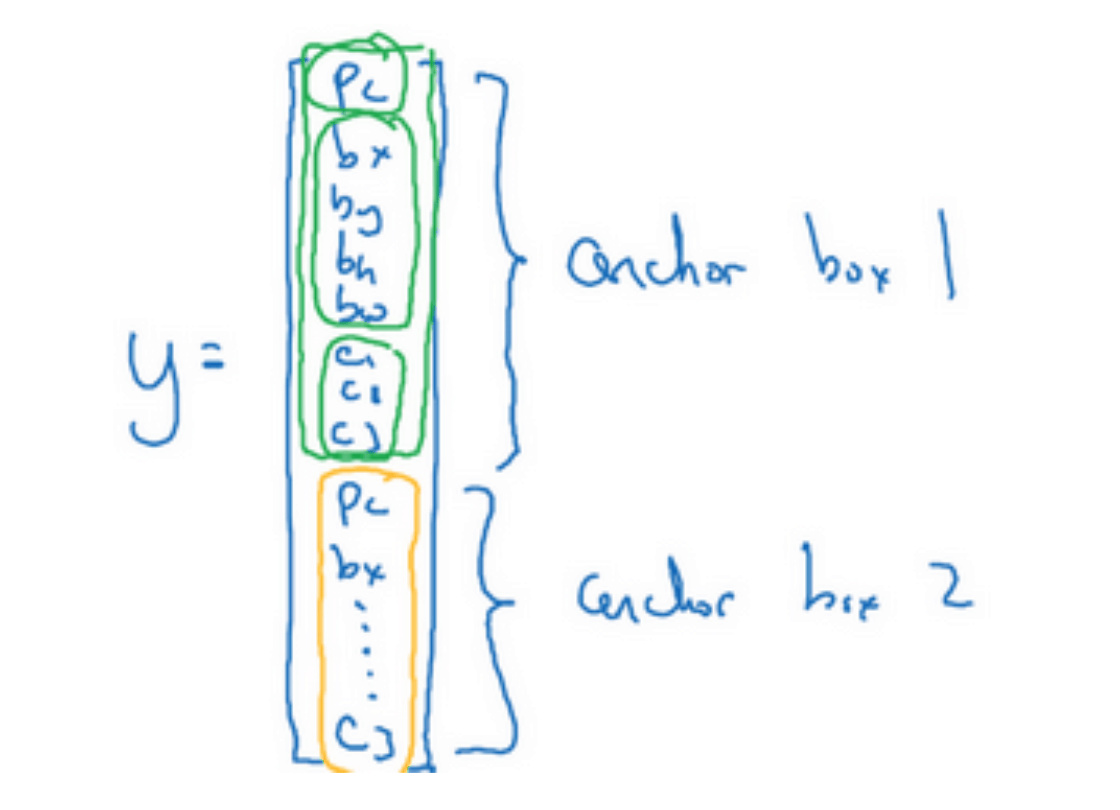
每个网格多加了一层输出。原来的输出维度是 3 x 3 x 8,现在是3 x 3 x 2 x 8(也可以写成3 x 3 x 16的形式)。这里的2表示有两个Anchor Boxes
同一网格出现了两个目标:人和车。为了同时检测两个目标,我们可以设置两个Anchor Boxes,Anchor box 1检测人,Anchor box 2检测车。
每个Anchor box都有一个Pc值,若两个Pc值均大于某阈值,则检测到了两个目标。
每个网格多加了一层输出。原来的输出维度是 3 x 3 x 8,现在是3 x 3 x 2 x 8(也可以写成3 x 3 x 16的形式)。这里的2表示有两个Anchor Boxes
使用YOLO算法时,只需对每个Anchor box使用上一节的非最大值抑制即可。Anchor Boxes之间并行实现。 Anchor Boxes形状的选择可以通过人为选取,也可以使用其他机器学习算法,例如k聚类算法对待检测的所有目标进行形状分类,选择主要形状作为Anchor Boxes
Region Proposals
滑动窗算法会对原始图片的每个区域都进行扫描,为了避免对无用区域的扫描,降低算法运行效率,耗费时间,可以使用Region Proposals的方法 对原始图片进行分割算法处理,然后支队分割后的图片中的块进行目标检测。
Region Proposals共有三种方法:
- R-CNN: 滑动窗的形式,一次只对单个区域块进行目标检测,运算速度慢。
- Fast R-CNN: 利用卷积实现滑动窗算法。
- Faster R-CNN: 利用卷积对图片进行分割,进一步提高运行速度。
比较而言,Faster R-CNN的运行速度还是比YOLO慢一些。